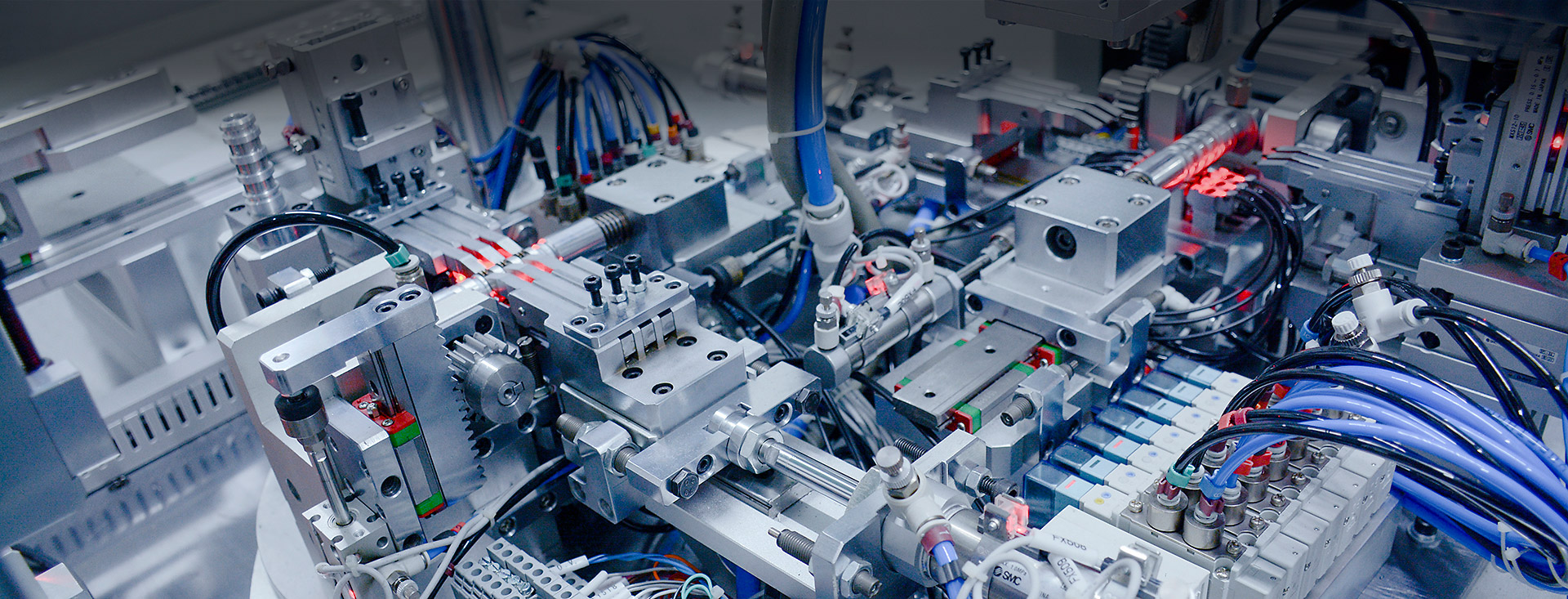
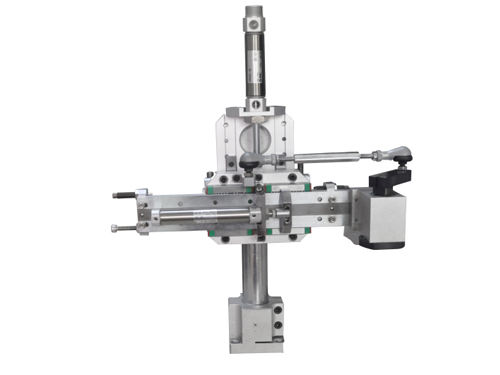
Maschineneinführungdes hochgeschwindigkeits-manipulators der drehtischverbindung
Angetriben Durch ZweiSätzevon servomotor und Gewindestange Kann Sich der Manipulator在Richtung der X-Achse und der z-Achse Bewegen。eine x-achsen-aktion plus zwei z-achsen-aktionen zykluszeitbeträgt1,2sekunden,被死的Geschwindigkeit,StavilitätundGenauigkeit des操纵器Garantiert und DenHerkömmlichenPneumatischenManipulator Orsetzen Kann。
Maschinenmerkmale des HochgeschwindigiteSmanipulators desdrehscheibengestänges
- Angetriben von zweiUnabhängigendrehstrom-servomotoren。
- MIT HOHER Genauigkeit Schraubenstange。
- VereinfachteHerkömmlicheKomplexeSteuerungssystemeingabe。
- Das Entnahme-,Hub-und EinpressModul Ist Einfach Zu Wechseln undleibel。
- 麻省理工学院Kompakter Struktur und Einfach Zu Integerenen。
- 标准设计,KURZE Liferzeit und Geringe Kosten。
- Ersetzen Sie den Traditionellen Pneumatischen Manipulator Durch Den Indexiertisch。
- Zykluszeit≥1,2秒
- Wiederholen Sie Die Positiergenaigkeit±0.03 mm。
Maschinennormdes hochgeschwindigkeitsmanators desdrehscheibengestänges
- ZweiSätzevonmodul≤8。
- Benutzerdefinierter标准> 8。








 +86 1348009233
+86 1348009233 ae@yiheda.com.
ae@yiheda.com.
 Fengxiang-Straße,Industriegebiet Dogfang,Beizha,Dumen-Stadt,东莞,Provinz广东,中国
Fengxiang-Straße,Industriegebiet Dogfang,Beizha,Dumen-Stadt,东莞,Provinz广东,中国 中文
中文 EN.
EN. J.P
J.P 德
德 es.
es. AR.
AR.
 5月29,2020
5月29,2020